Perceptron
- 之前已经了解到,机器学习的过程是:
- 输入一笔数据,这笔数据由\(\mathcal X\)和\(\mathcal Y\)组成,而x和y服从一个未知的分布\(\mathcal f\)
- 通过learning algorithm \(\mathcal A\)在hypothesis set \(\mathcal H\)中挑选一个合适的g,这个g即是机器学习到的,希望这个g能够很接近f,以至于能替代它。
- 机器学习的模型是由Learning algorithm \(\mathcal A\)和 hypothesis \(\mathcal H\)组成
今天就要学习一个模型,既然是模型,学完后就要清楚地知道它的hypothesis set 和 learning algorithm
1.Perceptron Hypothesis set
1.1抽象解释
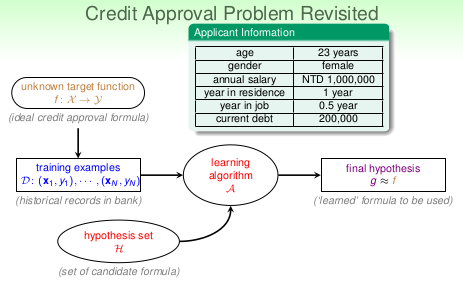
- 情景:如上图所示,已经了解客户的年龄,工资,工作年限,负债情况等,达到银行的标准,则通过他的信用卡申请。那么如果让机器来做,它要做的是什么呢?
> 回顾机器学习的过程,我们需要有输入数据D(x,y),Hypothesis \(\mathcal H\), learning algorithm \(\mathcal A\)。那么一一与这个情景对应,应是怎么样呢? - 机器:
- 把每个申请者当做一个向量\(\mathcal X\),把申请者的信息当做不同维度的特征,则\(\mathcal X = (x_1, x_2, x_3,\dots, x_n)\)
- 把同意申请设为\(+1\),不同意申请设为\(-1\), 则\(\mathcal Y: \{+1(good), -1(bad)\}, 0 忽略\)
- 银行的标准即为阈值(threshold)
- 不同维度的特征应该有不一样的权重\(\mathcal w\)
那么 \[ \mathcal H: h(x) = sign((\sum_{i=1} ^n w_i x_i) - threshold) \]
这个式子可以做一个数学上的简化: \[ \begin{aligned} h(x) &= sign((\sum_{i=1} ^n w_i x_i) - threshold)\\ &= sign((\sum_{i=1} ^n w_i x_i) +(- threshold) \cdot (+1))\\ &= sign(\sum_{i=0} ^n w_i x_i)\\ &= sign(\mathbf w^\mathrm{T} \mathbf x) \end{aligned} \]
这里将$ -threshold$ 当作\(w_0, 1当作x_0\), 从而将式子整理为两个向量内积的形式
1.2图像意义
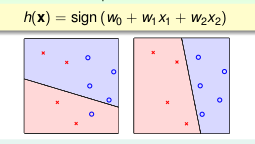
上图是perceptron在二维平面上的展示。
- \(\mathrm x\) 代表平面上的一个点,每个特征代表一个维度,这个图中只有两个特征
- \(\circ\) 代表\(+1\), \(\times\) 代表\(-1\)
- 直线代表\(\mathrm{h}\)
因此,正的应该在一边,负的应该在另一边 所以,二维的perceptron就是一个线性分类器,当然,可以想象,三维的perceptron也是一个分类器,不过不在是一条线,而是一个面
2.Perceptron Learning Algorithm
前面已经说了一个模型是由Hypothesis set和Learning Algorithm组成,光知道Hypothesis set是不够的,还需要知道如何从hypothesis set中选取一个合适的g,使\(g \approx f\),而这个过程就是learning algorithm所做的。
- 我们的目的是得到一个g,并且\(g \approx f\),但我们怎么判断g和f很接近呢?
- 我们知道的就是\(\mathbf{X}\)和\(\mathcal{y}\),所以如果\(g \approx f\)就会有\(g(\mathbf{x_n}) = f(\mathbf{x_n}) = \mathcal{y_n}\)
- 但hypothesis set中有无数条线,怎么办呢?
- 可以想像最开始有一条线,当这条线有错误时,就去修正它,直至它没出错为止
- 如何修正呢?
- 一轮一轮的修正。\(t=0,1,2\dots\)代表在第几轮, 若第t轮中,在一个点上\((\mathbf{x_{n(t)}},{y_{n(t)}})\)使得\(sign(\mathbf{w_{t}^\mathrm{T}}\mathbf{x_{n(t)}}) \neq {y_{n(t)}}\),则令\(\mathbf{w_{t+1}} = \mathbf{w_{t}} + \mathrm{y_{n(t)}}\mathbf{x_{n(t)}}\),直到没有错误。然后将\(\mathbf{w}\)返回,当作g
- 怎么判断它没有错误了呢?
- 将这些点编号,在每一轮中,按顺序去一个点一个点的检查,或者随机不重复的检查,当这些点全都遍历完,且没有错误的点,则没有错误了
按以上这种方式进行,称为cycle PLA
但依然有些疑问:
- 这样做PLA是否一定会停下来呢?
- 即使停下来,$ $
- 在样本以外的数据上表现怎么样呢?
- 如果不会停呢?
3.Guarantee of PLA
如果PLA能够停下来,那么所有的点肯定被分成了两部分,即数据被分成了两部分。那么这部分数据就是线性可分(linear separatablility的。反过来,由数据是线性可分一定能推出PLA可以停下来吗?
数据是线性可分,代表存在一条线,可以将数据分成两部分(如下图所示),不妨将这条线表示为\(w_f\),既然将数据分成了两部分肯定有 \[ \min_{n}y_{n}w_{f}^\mathrm{T}x_{n} > 0 \] \(y_{n}w_{f}^\mathrm{T}x_{n}\)表示的是点到直线的距离。也肯定有 \[ y_{n(t)} \mathbf{w}_{f}^\mathrm{T} \mathbf{x_{n(t)}} > \min_{n}y_{n}w_{f}^\mathrm{T}x_{n} > 0 \]
每次更新的过程: \[ \begin{aligned} \mathbf{w}_{f}^\mathrm{T}\mathbf{w}_{t} &= \mathbf{w}_{f}^\mathrm{T}(\mathbf{w}_{t-1} + y_{n(t-1)}\mathbf{x_{n(t-1)}})\\ & \ge \mathbf{w}_{f}^\mathrm{T}\mathbf{w}_{t-1} + \min_{n}y_{n}w_{f}^\mathrm{T}x_{n}\\ & \ge \mathbf{w}_{f}^\mathrm{T}\mathbf{w}_{t-2} + 2\min_{n}y_{n}w_{f}^\mathrm{T}x_{n}\\ & \ge \mathbf{w}_{f}^\mathrm{T}\mathbf{w}_{t-3} + 3\min_{n}y_{n}w_{f}^\mathrm{T}x_{n}\\ & \vdots \\ & \ge \mathbf{w}_{f}^\mathrm{T}\mathbf{w}_{0} + t\min_{n}y_{n}w_{f}^\mathrm{T}x_{n} \end{aligned} \]
\(w_{0} = 0\),所以
\[ \mathbf{w}_{f}^\mathrm{T}\mathbf{w}_{t} \ge t\min_{n}y_{n}w_{f}^\mathrm{T}x_{n}\\ \]
根据上式,可以看出\(w_f\)和\(w_t\)的内积的确越来越大,但是不一定是越来越靠近,可能只是\(||w_t||\)变大了
同时,当\(sign(\mathbf{w}_t^{\mathrm{T}} \mathbf{x}_{n(t)}) \neq y_{n(t)}\)时,\(w_t\)会改变。易得\(y_{n(t)} \mathbf{w}_t^\mathrm{T} \mathbf{x}_{n(t)} \le 0 \Leftrightarrow sign(\mathbf{w}_t^{\mathrm{T}} \mathbf{x}_{n(t)}) \neq y_{n(t)}\)
\[ \begin{aligned} ||\mathbf{w}_{t}||^2 & = ||\mathbf{w_{t-1}} + y_{n(t-1)}\mathbf{x}_{n(t-1)}||^2\\ & = ||\mathbf{w_{t-1}}||^2 + 2y_{n(t-1)} \mathbf{w}_t^{\mathrm{T}} \mathbf{x}_{n(t-1)} + ||y_{n(t-1)} \mathbf{x}_{n(t-1)}||^2\\ & \le ||\mathbf{w_{t-1}}||^2 + 0 + ||y_{n(t-1)} \mathbf{x}_{n(t-1)}||^2\\ & \le ||\mathbf{w_{t-1}}||^2 + \max_n||y_{n} \mathbf{x}_{n}||^2\\ & \le ||\mathbf{w_{t-2}}||^2 + 2\max_n||y_{n} \mathbf{x}_{n}||^2\\ & \vdots \\ & \le ||\mathbf{w_{0}}||^2 + t\max_n||y_{n} \mathbf{x}_{n}||^2\\ & \le t\max_n||y_{n} \mathbf{x}_{n}||^2 \end{aligned} \]
\[ \begin{aligned} \dfrac{\mathbf{w}_f^{\mathrm{T}}}{||\mathbf{w}_f||} \dfrac{\mathbf{w}_T}{||\mathbf{w}_T||} &\ge \dfrac{t\min \limits_n y_{n}w_{f}^\mathrm{T}x_{n}}{||w_f||\sqrt{t\max \limits_n||y_{n} \mathbf{x}_{n}||^2}}\\ &\ge \sqrt{t}\dfrac{\min \limits_n y_{n} \dfrac{w_{f}^\mathrm{T}}{||w_f||}x_{n}} {\max \limits_n||y_{n} \mathbf{x}_{n}||}\\ &= \sqrt{t}\dfrac{\min \limits_n y_{n} \dfrac{w_{f}^\mathrm{T}}{||w_f||}x_{n}} {\max \limits_n|| \mathbf{x}_{n}||} \end{aligned} \]
由此可以看出,\(w_f\)和\(w_T\)确实越来越靠近,最终重合,所以 \[ \dfrac{\mathbf{w}_f^{\mathrm{T}}}{||\mathbf{w}_f||} \dfrac{\mathbf{w}_T}{||\mathbf{w}_T||} \le 1 \] 令$ = _n ||x_n||^2= _n y_n _n $
\[ \sqrt{t}\dfrac{\min \limits_n y_{n} \dfrac{w_{f}^\mathrm{T}}{||w_f||}x_{n}} {\max \limits_n|| \mathbf{x}_{n}||} \le 1\\ t \le \dfrac{\mathrm{R^2}}{\rho ^2} \]
可以看出t是有上界的,所以当数据是线性可分的时候,PLA最终会停
4.Non-Separable Data
经过以上的推理,可以知道,当\(\mathcal{D}\) 是线性可分的时候,PLA 会选取的线会越来越接近\(w_f\)并最终停止。来总结下PLA算法的优缺点
- pros
- 实现简单,可以用于任何维度
- cons
- 需要假定\(\mathcal{D}\)是线性可分的
- 不能确定多久才能停?(不停可能是还没跑完,也可能是\(\mathcal{D}\)根本不是线性可分的)
所以,如果\(\mathcal{D}\)不是线性可分怎么办呢?
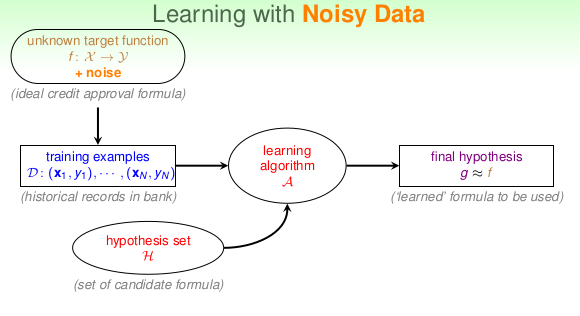
首先机器学习的\(\mathcal{D}\)的设定并不是完全基于target function \(f\),可能在收集数据或者产生数据的时候就有噪声,在这样的情况下,如何找到一个g并且\(g \approx f\)?
一般情况下,噪声不会太多,因此,通常情况下,\(y_n = f(x_n)\),那么也可以找到一个g且\(g \approx f on \mathcal{D}\),也即通常情况下,\(y_n = g(x_n)\)
既然这样,能否像这样找出g呢?
\[ \mathbf{w}_g \leftarrow \mathop{\arg\max}_\mathbf{w}\sum_{n=1}^N\parallel y_n \neq sign(\mathbf{w}^\mathrm{T}\mathbf{x}_n) \parallel \]
这样做是不可能的.NP-hard
能否通过修改之前的PLA,然后来找出g呢? 这个是可以的,很容易想到,噪声并不算多,找一个犯错犯的少的线即可。这种PLA称作pocket PLA。其原理和贪心法很像。
- 初始化\(\mathbf{w}\)
- 随机找一个点,看是否有错
- 若有错,则更正这个错误,\(w_{t+1} \leftarrow w_t + y_{n(t)}x_{n(t)}\)
- 如果\(w_{t+1}\)这条线犯的错误更少,则替换\(\hat{\mathcal{w}}\)
- 重复第2,3,4步操作
- 经过足够多轮的迭代后,返回\(\hat{\mathcal{w}}\)